控制限度
本文解释什么是控制限以及控制图的不同控制限是什么。您还将了解如何计算控制限以及确定过程控制限的工作示例。
什么是控制限?
控制限是控制图上的水平线,用于确定过程是否受控。
控制图有两个控制限:控制上限和控制下限,分别界定上方和下方的控制区域。
因此,控制限是用于指示过程的控制范围的值。如果从过程中获得的测量值在控制限内,则意味着该过程受到控制。否则,必须检查机器或过程,因为它很可能出现偏差。
控制限值的类型
控制限值为:
- 控制上限 (LCS) :这条线表示过程中可接受的最大值。
- 控制下限 (LCI) :这条线表示过程中可接受的最小值。
- 中央控制线:这是代表图形平均值的线。点越接近这条线,过程就越稳定。

如何计算控制限
目前,过程的控制限通常由允许控制过程的计算机软件计算。但是,了解它们的计算方式也很重要,因为您可能需要手动查找它们。
计算控制图的控制限取决于您要制作的图表类型,因为值会根据它是平均值控制图还是极差控制图而变化。
平均控制图是评估过程平均值演变的图表。因此,使用以下公式计算一组值的平均值:

金子:
-

是小节编号 i。
-

是进行的测量的数量。
我们将平均值控制图的中心值指定为

,是样本的平均值,计算公式如下:

金子:
-

是样本 j 的平均值。
-

是采集的样本数。
相反,范围控制图的中心值是所有采样范围的平均值:

金子:
-

是样本j的范围。
-
是采集的样本数。
因此,控制图控制限的计算公式如下:
控制卡
![\begin{array}{c}LCS=\overline{\overline{X}}+A_2\cdot \overline{R}\\[3ex]LCI=\overline{\overline{X}}-A_2\cdot \overline{R}\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-fea27f2cb07784e5d8f7e128a010a02c_l3.png "Rendered by QuickLaTeX.com")
R控制卡
![\begin{array}{c}LCS=D_4\cdot \overline{R}\\[3ex]LCI=D_3\cdot\overline{R}\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-5d3cf71032f18cd8710d9a2165d8daac_l3.png "Rendered by QuickLaTeX.com")
其中参数A 2 、D 3和D 4的值见下表:
| 尺寸(个数) | 2点 | 第三天 | J4 |
|---|---|---|---|
| 2 | 1,880 | 0.000 | 3,267 |
| 3 | 1,023 | 0.000 | 2,575 |
| 4 | 0.729 | 0.000 | 2,282 人 |
| 5 | 0.577 | 0.000 | 2,115 |
| 6 | 0.483 | 0.000 | 2004年 |
| 7 | 0.419 | 0.076 | 1,924 |
| 8 | 0.373 | 0.136 | 1,864 |
| 9 | 0.337 | 0.184 | 1,816 |
| 十 | 0.308 | 0.223 | 1,777 |
计算控制限的示例
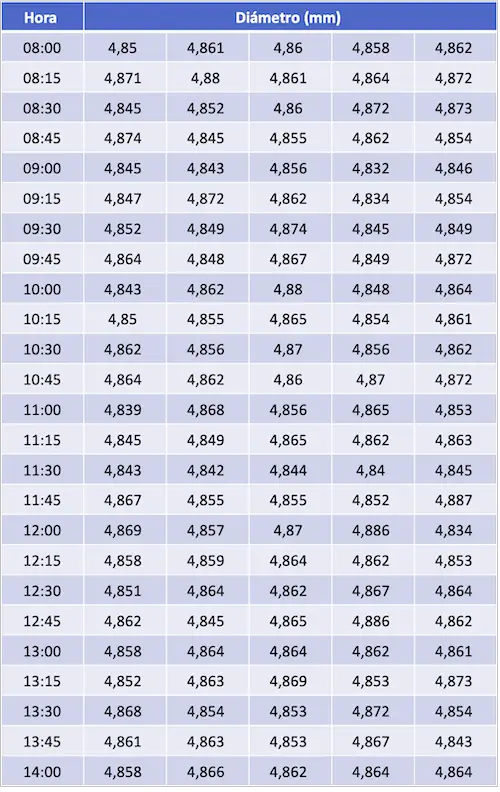
一家工业公司希望控制圆柱体直径的测量,以查看其生产过程是否受到控制。为此,每 15 分钟取样 5 个圆柱体并测量它们的直径。下表显示了测量记录。
为了找到控制限,我们必须首先计算每组测量值的算术平均值和极差:
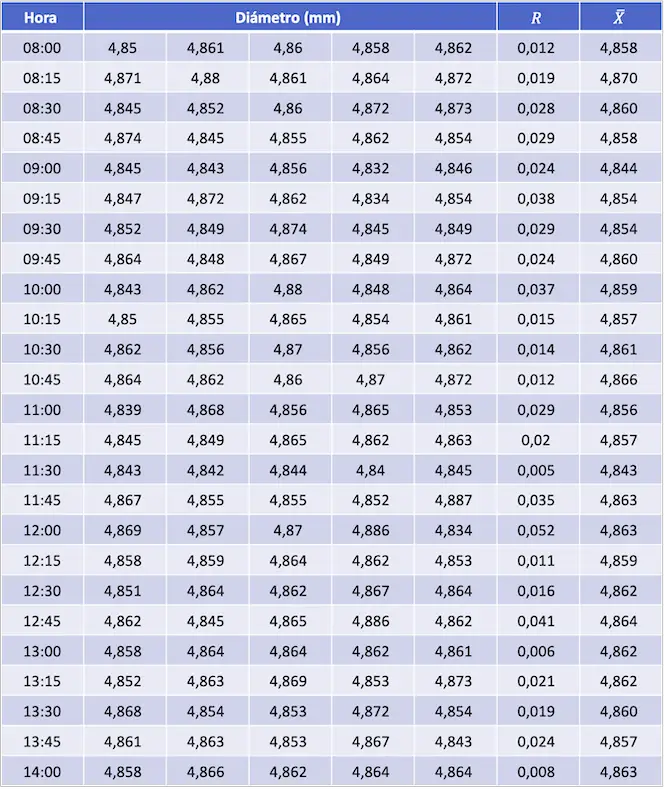
现在让我们计算均值和极差的平均值,这将分别是平均值和极差控制图的中心值:


在这种情况下,每个样本由 5 个测量值组成,因此控制限公式的系数如下:



我们计算平均控制图和扩展控制图的控制上限和下限:
控制图控制限值
![\begin{array}{c}LCS=\overline{\overline{X}}+A_2\cdot \overline{R}=4,8589+0,577\cdot 0,0227=4,8720\\[3ex]LCI=\overline{\overline{X}}-A_2\cdot \overline{R}=4,8589-0,577\cdot 0,0227=4,8458\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-c36f6b368a9a737de0ad139fd3a3953c_l3.png "Rendered by QuickLaTeX.com")
控制限值 R控制卡
![\begin{array}{c}LCS=D_4\cdot \overline{R}=2,115\cdot 0,0227=0,0481\\[3ex]LCI=D_3\cdot\overline{R}=0\cdot 0,0227=0\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-4f60f6739025a68d8e145d789bf3edea_l3.png "Rendered by QuickLaTeX.com")
因此,运动控制卡如下:
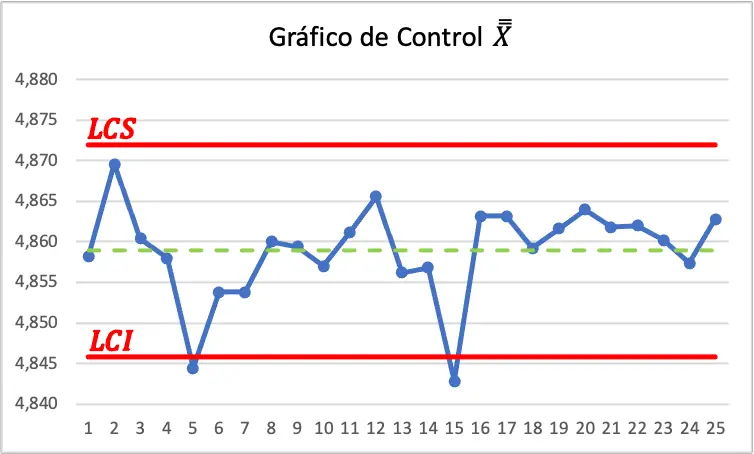
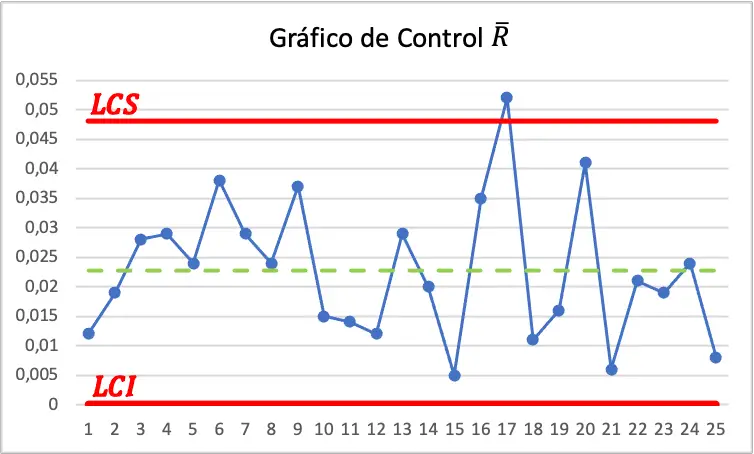
在第一个控制图中我们可以看到有两个值小于控制下限。另外,在第二个控制图中,也存在高于控制上限的值。因此,该过程不受控制。
关于作者
本杰明·安德森博
大家好,我是本杰明,一位退休的统计学教授,后来成为 Statorials 的热心教师。 凭借在统计领域的丰富经验和专业知识,我渴望分享我的知识,通过 Statorials 增强学生的能力。了解更多