ขีดจำกัดการควบคุม
บทความนี้จะอธิบายว่าขีดจำกัดการควบคุมคืออะไร และขีดจำกัดการควบคุมที่แตกต่างกันของแผนภูมิควบคุมคืออะไร นอกจากนี้ คุณยังจะได้เห็นวิธีคำนวณขีดจำกัดการควบคุม ตลอดจนตัวอย่างการทำงานซึ่งมีการกำหนดขีดจำกัดการควบคุมของกระบวนการด้วย
ขีดจำกัดการควบคุมคืออะไร?
ขีดจำกัดการควบคุม คือเส้นแนวนอนบนแผนภูมิควบคุมที่ใช้ในการพิจารณาว่ากระบวนการได้รับการควบคุมหรือไม่
แผนภูมิควบคุมมีขีดจำกัดการควบคุมสองแบบ: ขีดจำกัดการควบคุมด้านบนและด้านล่าง ซึ่งแบ่งเขตพื้นที่ควบคุมด้านบนและด้านล่างตามลำดับ
ดังนั้น ขีดจำกัดการควบคุมคือค่าที่ใช้ระบุพื้นที่ควบคุมของกระบวนการ หากการวัดที่ได้จากกระบวนการอยู่ภายในขีดจำกัดการควบคุม แสดงว่ากระบวนการได้รับการควบคุม มิฉะนั้นจะต้องตรวจสอบเครื่องจักรหรือกระบวนการเนื่องจากมีแนวโน้มว่าจะเบี่ยงเบนไป
ประเภทของขีดจำกัดการควบคุม
ขีดจำกัดการควบคุมคือ:
- Upper Control Limit (LCS) : นี่คือบรรทัดที่ระบุค่าสูงสุดที่ยอมรับในกระบวนการ
- ขีดจำกัดการควบคุมล่าง (LCI) : นี่คือเส้นที่ระบุค่าต่ำสุดที่ยอมรับในกระบวนการ
- เส้นควบคุมกลาง : นี่คือเส้นที่แสดงค่าเฉลี่ยของกราฟ ยิ่งจุดอยู่ใกล้เส้นนี้มากเท่าไร กระบวนการก็จะยิ่งมีเสถียรภาพมากขึ้นเท่านั้น

วิธีการคำนวณขีดจำกัดการควบคุม
ในปัจจุบัน ขีดจำกัดการควบคุมของกระบวนการโดยทั่วไปจะคำนวณโดยซอฟต์แวร์คอมพิวเตอร์ที่ช่วยให้สามารถควบคุมกระบวนการได้ อย่างไรก็ตาม สิ่งสำคัญคือคุณต้องทราบวิธีการคำนวณ เนื่องจากคุณอาจต้องค้นหาด้วยตนเอง
การคำนวณขีดจำกัดการควบคุมของแผนภูมิควบคุมจะขึ้นอยู่กับประเภทของแผนภูมิที่คุณต้องการสร้าง เนื่องจากค่าจะเปลี่ยนไปขึ้นอยู่กับว่าเป็นแผนภูมิควบคุมสำหรับค่าเฉลี่ยหรือช่วง
แผนภูมิควบคุมค่าเฉลี่ย คือกราฟที่ใช้ประเมินวิวัฒนาการของค่าเฉลี่ยของกระบวนการ ดังนั้นค่าเฉลี่ยของชุดค่าจึงคำนวณโดยใช้สูตรต่อไปนี้:

ทอง:
-

คือเลขวัด i
-

คือจำนวนการวัดที่ทำ
เราจะกำหนดค่ากลางของแผนภูมิควบคุมสำหรับค่าเฉลี่ยเป็น

ซึ่งเป็นค่าเฉลี่ยของกลุ่มตัวอย่างและคำนวณด้วยนิพจน์ต่อไปนี้

ทอง:
-

คือค่าเฉลี่ยของกลุ่มตัวอย่าง j
-

คือจำนวนตัวอย่างที่ถ่าย
ในทางตรงกันข้าม ค่ากลางของ แผนภูมิควบคุมขอบเขต คือค่าเฉลี่ยของขอบเขตของกลุ่มตัวอย่างทั้งหมดที่นำมา:

ทอง:
-

คือพิสัยของกลุ่มตัวอย่าง j
-
คือจำนวนตัวอย่างที่ถ่าย
ดังนั้น สูตรในการคำนวณขีดจำกัดการควบคุม ของแผนภูมิควบคุมจึงเป็นดังนี้:
การ์ดควบคุม
![\begin{array}{c}LCS=\overline{\overline{X}}+A_2\cdot \overline{R}\\[3ex]LCI=\overline{\overline{X}}-A_2\cdot \overline{R}\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-fea27f2cb07784e5d8f7e128a010a02c_l3.png "Rendered by QuickLaTeX.com")
การ์ดควบคุม R
![\begin{array}{c}LCS=D_4\cdot \overline{R}\\[3ex]LCI=D_3\cdot\overline{R}\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-5d3cf71032f18cd8710d9a2165d8daac_l3.png "Rendered by QuickLaTeX.com")
โดยที่ค่าของพารามิเตอร์ A 2 , D 3 และ D 4 พบในตารางต่อไปนี้:
| ขนาด (หมายเลข) | เวลา 2 | วันที่ 3 | เจ4 |
|---|---|---|---|
| 2 | 1,880 | 0.000 | 3,267 |
| 3 | 1,023 | 0.000 | 2,575 |
| 4 | 0.729 | 0.000 | 2,282 |
| 5 | 0.577 | 0.000 | 2,115 |
| 6 | 0.483 | 0.000 | 2547 |
| 7 | 0.419 | 0.076 | 1,924 |
| 8 | 0.373 | 0.136 | 1,864 |
| 9 | 0.337 | 0.184 | 1,816 |
| สิบ | 0.308 | 0.223 | 1,777 |
ตัวอย่างการคำนวณขีดจำกัดการควบคุม
บริษัทอุตสาหกรรมแห่งหนึ่งต้องการควบคุมการวัดเส้นผ่านศูนย์กลางของกระบอกสูบเพื่อดูว่ากระบวนการผลิตอยู่ภายใต้การควบคุมหรือไม่ ในการดำเนินการนี้ ให้นำตัวอย่าง 5 กระบอกสูบทุกๆ 15 นาทีแล้ววัดเส้นผ่านศูนย์กลาง ตารางต่อไปนี้แสดงการบันทึกการวัด
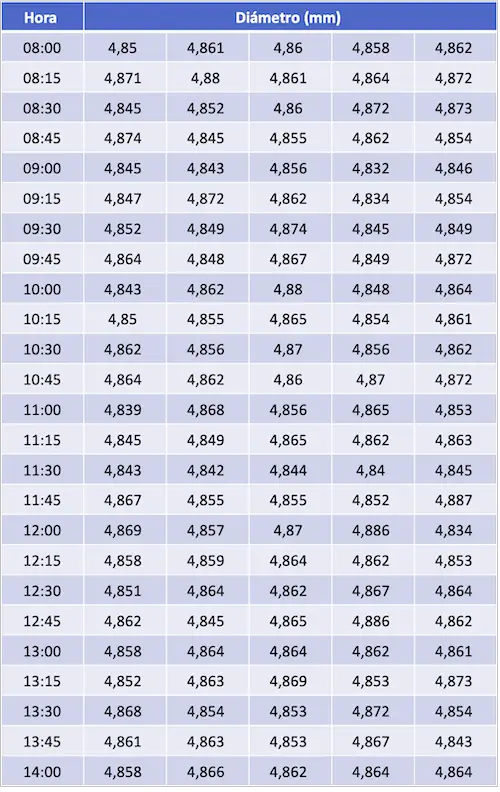
ในการค้นหาขีดจำกัดการควบคุม เราต้องใช้ค่าเฉลี่ยเลขคณิตและช่วงของการวัดแต่ละชุดก่อน:
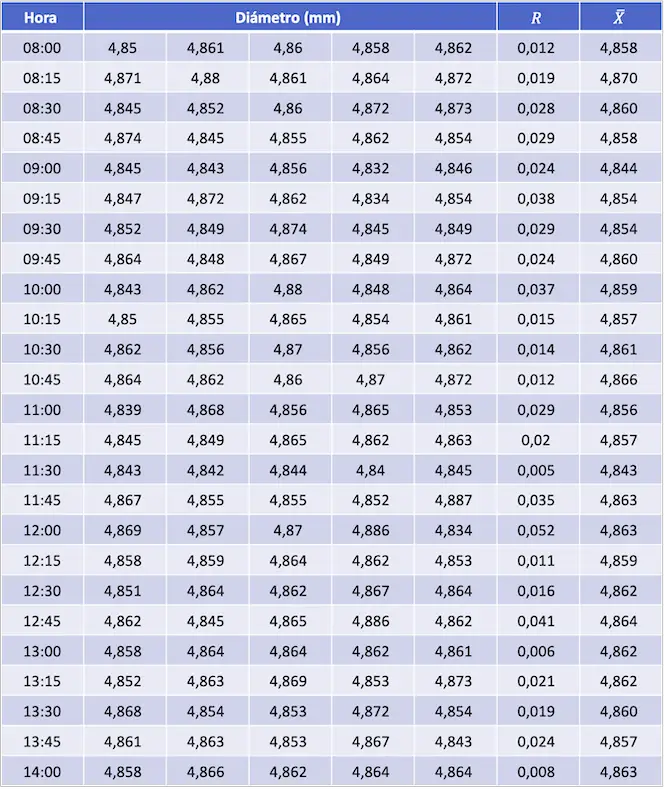
ทีนี้มาคำนวณค่าเฉลี่ยของค่าเฉลี่ยและช่วงซึ่งจะเป็นค่ากลางของแผนภูมิควบคุมสำหรับค่าเฉลี่ยและช่วงตามลำดับ:


ในกรณีนี้ แต่ละตัวอย่างจะประกอบด้วยการวัด 5 ครั้ง ค่าสัมประสิทธิ์ของสูตรขีดจำกัดการควบคุมจึงเป็นดังนี้:



เราคำนวณขีดจำกัดการควบคุมบนและล่างของแผนภูมิควบคุมเฉลี่ยและแผนภูมิควบคุมแบบขยาย:
ขีดจำกัดการควบคุมแผนภูมิควบคุม
![\begin{array}{c}LCS=\overline{\overline{X}}+A_2\cdot \overline{R}=4,8589+0,577\cdot 0,0227=4,8720\\[3ex]LCI=\overline{\overline{X}}-A_2\cdot \overline{R}=4,8589-0,577\cdot 0,0227=4,8458\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-c36f6b368a9a737de0ad139fd3a3953c_l3.png "Rendered by QuickLaTeX.com")
ขีดจำกัดการควบคุมของ การ์ดควบคุม R
![\begin{array}{c}LCS=D_4\cdot \overline{R}=2,115\cdot 0,0227=0,0481\\[3ex]LCI=D_3\cdot\overline{R}=0\cdot 0,0227=0\end{array}](https://statorials.org/wp-content/ql-cache/quicklatex.com-4f60f6739025a68d8e145d789bf3edea_l3.png "Rendered by QuickLaTeX.com")
การ์ดควบคุมการฝึกจึงมีดังต่อไปนี้:
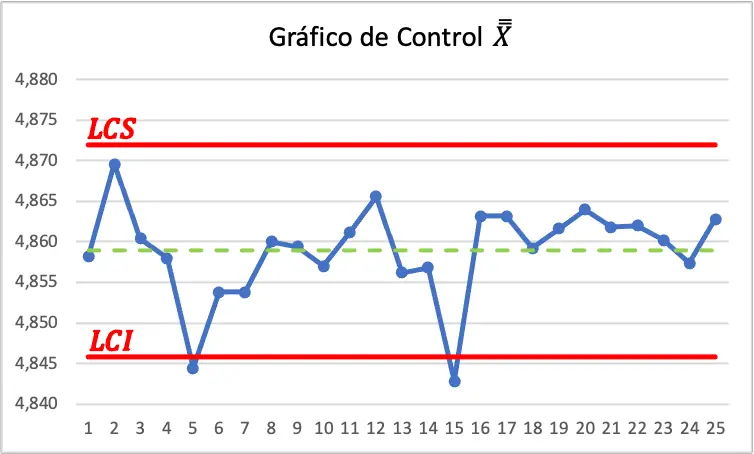
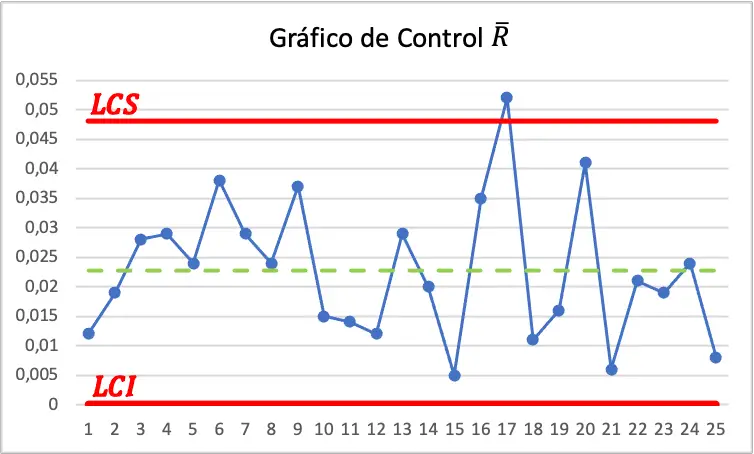
ในแผนภูมิควบคุมแรก เราจะเห็นว่าค่าสองค่านั้นน้อยกว่าขีดจำกัดการควบคุมด้านล่าง นอกจากนี้ ในแผนภูมิควบคุมที่สอง ยังมีค่าที่อยู่เหนือขีดจำกัดการควบคุมด้านบนด้วย กระบวนการนี้จึงไม่ได้รับการควบคุม
เกี่ยวกับผู้แต่ง
ดร.เบนจามิน แอนเดอร์สัน
สวัสดี ฉันชื่อเบนจามิน ศาสตราจารย์สถิติเกษียณอายุแล้ว และผันตัวมาเป็นครูสอนสถิติโดยเฉพาะ ด้วยประสบการณ์และความเชี่ยวชาญที่กว้างขวางในสาขาสถิติ ฉันกระตือรือร้นที่จะแบ่งปันความรู้ของฉันเพื่อเสริมศักยภาพนักเรียนผ่าน Statorials. รู้เพิ่มเติม